Update: for latest info about this project check out my wife’s Instagram page.
It’s been a while since my last post, for various reasons, but now I am ready to share some info about my latest project. I love building and flying FPV multirotors. By now I have quite the collection. But there is one thing I noticed over time. Every time I set out to build a new multirotor, I need to buy a whole set of electronics for it. This means purchasing another flight controller, radio receiver, bluetooth module, video transmitter, camera, onscreen display (OSD), voltage regulator, and then soldering it all together. That’s roughly $200 worth of electronics and a few hours of soldering it all together and making it look nice.
I wanted to figure out a better way to build more different multirotors without wasting money and effort rebuilding the flight control and FPV electronics every time. This is how Tanky Pod was born!
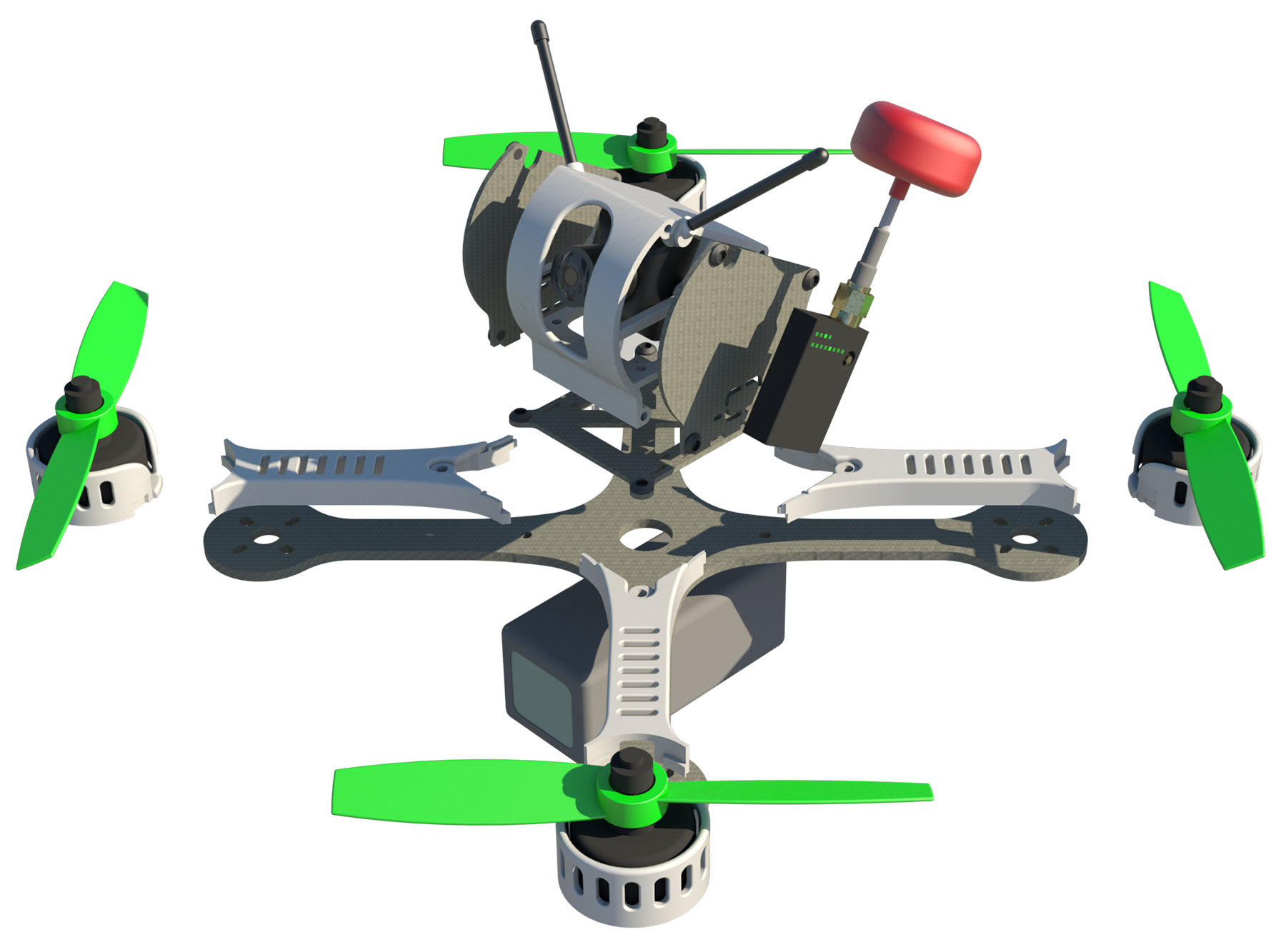
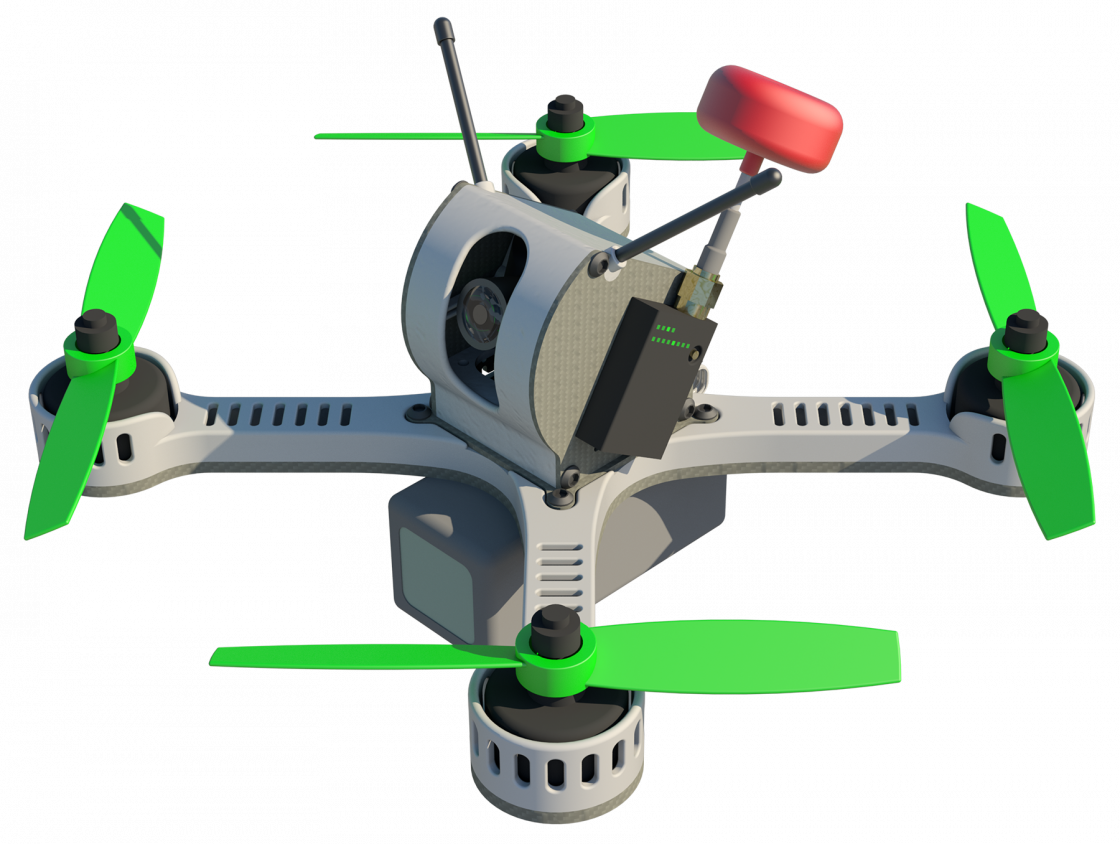
Tanky Pod is a self contained pod with radio, bluetooth, flight controller, and all of the FPV goodies on board. Even including a tilt servo for the camera. It’s all contained in a plastic aerodynamic shell with carbon fiber skeleton sides for strength. The base of the Tanky Pod has a standard 50mm (45mm center to center) spacing, making this pod compatible with many standard frames designed for the KK2.0 board. With adopters it can basically be mounted anywhere.
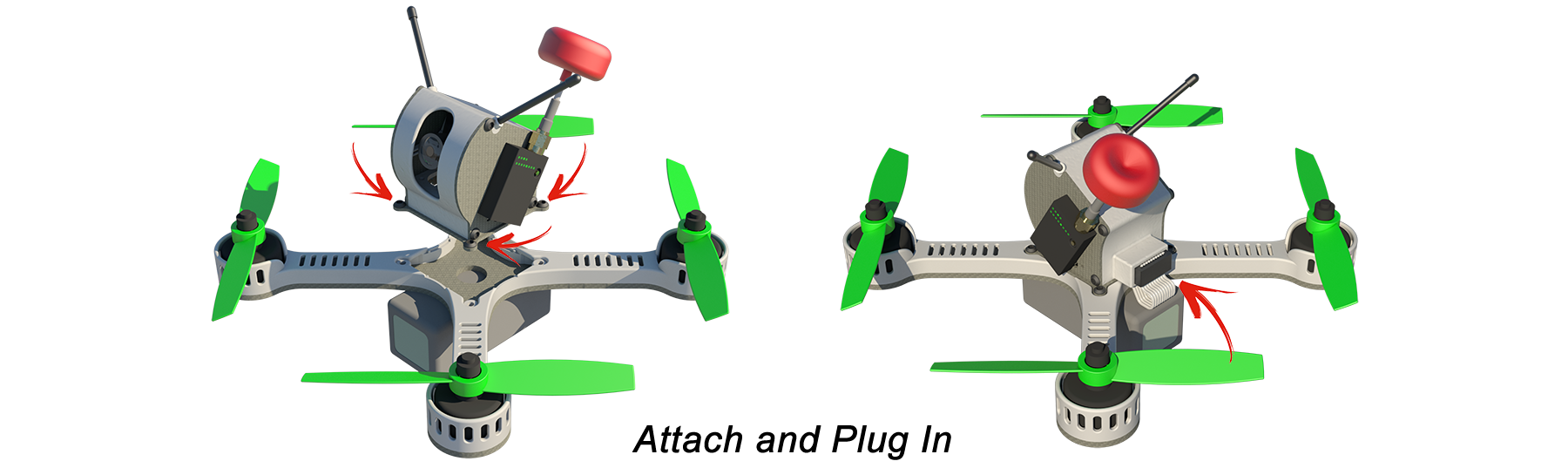
To make it easy to swap from one multirotor to another, the pod will have a standard 10 pin port on the back. To attach the pod to your multirotor you simply secure it with 4 screws and plug in the 10 pin cable. Eventually I would like to write an Android companion program to swap between different drone profiles, but for now simply copy and pasting the settings file for Cleanflight in command line mode works just fine.

To complement the Tanky Pod I also designed three “X” shaped quad frames for FPV racing, to accomodate 4-inch, 5-inch, and 6-inch blades. The Tanky Quad frames have the same plastic construction with CF skeleton. The plastic bits are really there to hide all the wires and provide protection for the ESCs and motors, most of the strength comes from the CF skeleton.

The frames in combination with the pod are designed to give the quadcopter the optimal aerodynamic shape during fast forward flight. To make sure you can still see where you are going when flying tilted forward by 45 degrees or more, the camera is tiltable from -15 degrees all the way to 45 degrees. This means no more circling around so you can see where you are landing, and no more slowing down just so you can see where you are going.

I am just at the inception part of this project. So far I’ve used Shapeways to 3D print the plastic parts and I am purchasing a CNC cutter to cut the CF for the frames.
I would love to hear any feedback. Eventually I am planning to put this project up on Kickstarter and see if I can get enough backers to get these parts injection molded, which would make of an incredibly strong and good looking FPV race setup.